
予選競技の概要
レスキューロボットコンテスト2022では競技会予選をオンラインにて実施する。競技会予選は、すべての予選参加チームから競技会本選に出場する14チームを選抜するために実施する。本選へ選出される14チームの内訳は、主催者枠1チーム、競技ポイントに基づく選抜9チーム、およびアイデアなどが評価された4チームである。
競技会予選は、期限までに提出された8分以内の動画に基づいて実施する。動画は事前公開された競技会予選競技課題を各チームが実施した内容とする。
競技概要
競技会予選競技課題の詳細はこちら
競技会予選では、各チームは、後述する「課題フィールドA」、「課題フィールドB」を用意し、それぞれの課題の実施動画を撮影し、動画ファイルを事前に提出します。動画に関しては遠隔操縦(目視可)にてロボットを操作し、ダミヤンの救出・搬送までの一連の流れを実施、撮影します。課題フィールドごとの制限時間はありませんが、2 つの課題フィールドを合わせて 8 分以内とします。各動画の流れは以下の通りとします。
- 1. 録画開始(搬送までにかかった時間の測定開始)
- 2. ゲートからロボットが発進
- 3. 各ミッションを実施しつつ、ダミヤンまで移動
- 4. ダミヤンの救出
- 5. ダミヤンをゲートまで搬送(搬送までにかかった時間の測定終了+評価終了)
- 6. 録画終了
ダミヤンについて

ダミヤンについては、委員会より各チームへ送付されたダミヤンを使用します。なお、競技会予選で使用するダミヤンは、本選競技で使用するダミヤンとは異なります。
ダミヤンには、容体判定に用いるQRコードを胸部に貼り付けます(容体判定を行う場合)。
また、チームへ送付されたダミヤンは衣服非着用となっており、チームで衣服を作成の上、着用させることも可能です(着用に関しては制限があります)。
課題フィールドについて
各課題フィールドのイメージ画像とレイアウト画像を以下に示します。
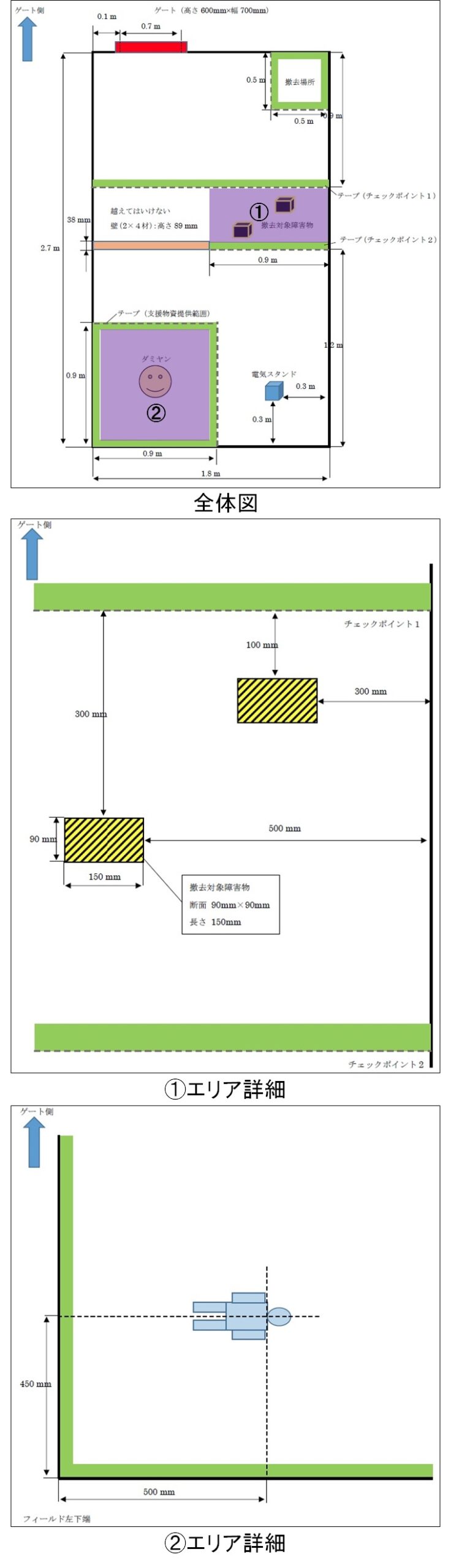
- 課題フィールドA

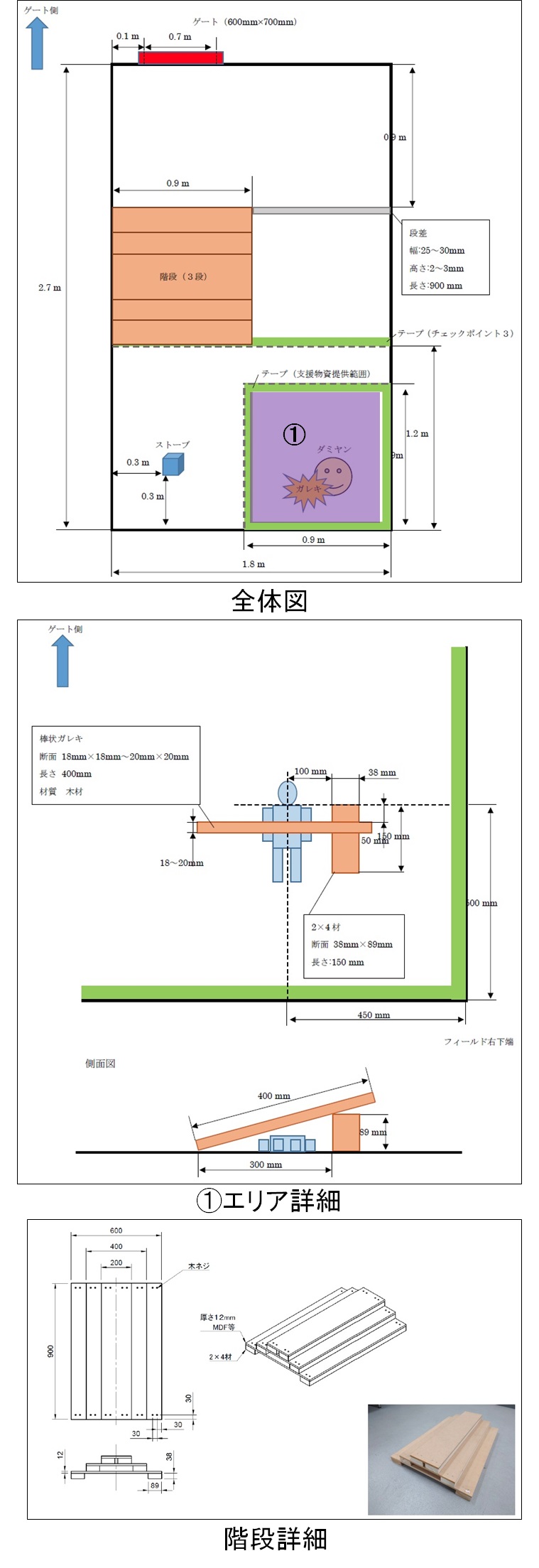
- 課題フィールドB

なお、発見報告に用いる「電気スタンド」と 「ストーブ」については、規定サイズの箱に指定の画像を貼り付けて制作します。参考写真を以下に示します。

ポイント詳細
各ミッションの確定ポイント(260点満点)は、以下のミッションポイントとフィジカルポイントを足したものです。
- 課題フィールド A ミッションポイント(80点満点)
- 「チェックポイント1を通過(10点)」
ロボットの床面への投射影がチェックポイント1のラインを完全に通り過ぎた場合にポイントが与えられる。 - 「撤去障害物を撤去場所に入れる(10点×2個)」
指定された撤去障害物2個を撤去場所まで運んだ場合にそれぞれの撤去障害物ごとにポイントが与えられる。ただし、撤去障害物の投射影が撤去場所を示すラインを完全に通り過ぎた場合を撤去完了とする。 - 「チェックポイント2を通過(10点)」
ロボットの床面への投射影がチェックポイント2のラインを完全に通り過ぎた場合にポイントが与えられる。 - 「電気スタンドの発見報告(5点)」
発見したことを示すため、ロボットの正面側(ゲートから出る際の進行方法側)もしくは、アーム等が指定された電気スタンドに接触した場合、ポイントが与えられる。なお、偶然接触したと判断した場合は未達成とする。 - 「ダミヤンへの支援物資提供(10点)」
ダミヤン周辺の指定された範囲に支援物資を正立状態で置いた場合、ポイントが与えられる。 - 「ダミヤンの容体判定(5点)」
ダミヤンの胸部へ貼り付けられている指定されたQRコードをロボットのカメラ画像を通して正しく判定した場合、ポイントが与えられる。なお、成否判定のために容体判定時のPC画面のスクリーンショットを保存し提出する。 - 「ダミヤンを救出してチェックポイント2を通過(10点)」
ダミヤンを救出した状態で、ロボットの床面への投射影がチェックポイント2のラインを完全に通り過ぎた場合にポイントが与えられる。 - 「ダミヤンをゲートまで搬送(10点)」
ダミヤンを救出した状態で、ロボットの床面への投射影がゲートを完全に通り過ぎた場合にポイントが与えられる。 - 課題フィールド B ミッションポイント(100点満点)
- 「階段を走破(行き)(20点)」
ロボットがゲート側から階段を乗り越え、ロボットが階段の反対側の床に接触した場合にポイントが与えられる。ただし、途中で階段側面から落下した場合は未達成とする。 - 「階段を走破(ダミヤン乗せて帰り)(30点)」
ロボットがダミヤンを救出した状態で、チェックポイント3側から階段を乗り越え、ロボットが階段の反対側の床に接触した場合にポイントが与えられる。ただし、途中で階段側面から落下した場合は未達成とする。 - 「チェックポイント3を通過(10点)」
ロボットの床面への投射影がチェックポイント3のラインを完全に通り過ぎた場合にポイントが与えられる。 - 「ストーブの発見報告(5点)」
発見したことを示すため、ロボットの正面側(ゲートから出る際の進行方法側)もしくは、アーム等が指定されたストーブに接触した場合、ポイントが与えられる。なお、偶然接触したと判断した場合は未達成とする。 - 「ダミヤンへの支援物資提供(10点)」
ダミヤン周辺の指定された範囲に支援物資を正立状態で置いた場合、ポイントが与えられる。 - 「ダミヤンの容体判定(5点)」
ダミヤンの胸部へ貼り付けられている指定されたQRコードをロボットのカメラ画像を通して正しく判定した場合、ポイントが与えられる。なお、成否判定のために容体判定時のPC画面のスクリーンショットを保存し提出する。 - 「ダミヤンを救出してチェックポイント3を通過(10点)」
ダミヤンを救出した状態で、ロボットの床面への投射影がチェックポイント3のラインを完全に通り過ぎた場合にポイントが与えられる。 - 「ダミヤンをスタートゲートまで搬送(10点)」
ダミヤンを救出した状態で、ロボットの床面への投射影がゲートを完全に通り過ぎた場合にポイントが与えられる。 - 課題フィールド A フィジカルポイント(40点満点)
- 「スタートから搬送完了までの時間」
動画開始から搬送完了までにかかった時間により定められた計算式を用いて評価する。 - 課題フィールド B フィジカルポイント(40点満点)
- 「スタートから搬送完了までの時間」
動画開始から搬送完了までにかかった時間により定められた計算式を用いて評価する。 - その他
- 「審判団による原点」
規定通りのフィールド配置になっていない場合や不適切な行為が見受けられた場合に発生します。
本選への選抜方法
本選へ選抜される14チームの選抜方法は以下のとおりである。
- 確定ポイント枠(9チーム)
- ・主催者枠を除く競技会予選における確定ポイント上位9チーム
- 主催者枠(1チーム)
- ・書類審査時に選出された1チーム
- チャレンジ枠(4チーム)
- ・上記チーム以外の中からアイデアなどが評価された4チーム
