
コンテストの背景
阪神・淡路大震災の後、私たちは救命救助機器の技術的な課題を調査・研究しました。その際に、救命救助の活動や機器に関する継続的な研究はもちろんのこと、それらに関する世代を超えての啓発も重要であることを痛感しました。
そこで、レスキューシステムを拡充し災害に強い世の中を作るという大きな目標に向けて、技術の継承と次世代人材育成のための一つの手段として、私たちはレスキューロボットコンテストを提案しました。
ロボットコンテストのようなイベントは、「教育」、「社会性」、「科学技術」の三つの軸で評価することができます。
まず、このようなコンテストを開催することによって、従来のロボットコンテストと同じように、創造性を育む場や機会を提供することができます。また、競技に参加することを通じて、災害救助や防災・減災について深く考えてもらうことができ、競技を見る人に対しても、防災・減災に関する意識向上を図ることができます。さらに、参加チームから、専門の研究者や技術者が思いもつかなかったような新しいレスキューのアイデアが生まれることも期待しています。
このように、レスコンはこれら三つの軸の全ての要素を兼ね備えており、各要素が、「やさしさ」というコアコンセプトで結ばれています。

もちろん、現実のレスキュー現場とここで考えている競技会場には雲泥の差があり、このコンテストで直ちに実用的なレスキュー技術が生まれるとは考えておりません。ただ、このようなコンテストに多くの方に携わっていただくことによって、レスキュー活動の大切さ、難しさを考える機会を数多く提案できればと考えています。それによって、1,000個のアイデアの中から、たった一つでもいいから真に役立つ「輝くアイデア」が見つかれば良いと考えています。
競技の設定(ストーリー)
ここは「国際レスキュー工学研究所」 (架空の研究所)。
この研究所では、レスキューに関する技術の評価と訓練のために、
コンテスト形式で機材や運転の技術の高度化が行われています。
研究所内には、大地震で倒壊した市街地を模擬した6分の1スケールの実験フィールドが構築されており、いままさにレスキュー訓練が開始されようとしています。 なお、状況の設定は次のとおりです。
状況1
ガレキの中には要救助者を模擬したレスキューダミー(ダミヤン)が数体設置されている。
状況2
ダミヤンはガレキの下にも埋没しているかもしれない。また、他のガレキは私有地にあるので、むやみに破壊し乗り越えてはいけない。
状況3
二次災害のおそれがあり、人間が立ち入ることが出来ない。
そこで、遠隔操縦のレスキューロボットの出動だ!
ロボットから送られてくる映像をもとに、一刻も早くガレキや障害物を取り除きダミーを探し、 優しく助け出し、安全な場所まで運ぶことが今回の任務です。
競技ルールと進行
競技ルール
各チームのロボットは、ロボットベースから出動し、レスキュー活動時間内に3体のダミヤンを救出しなければなりません。ダミヤンには、センサが内蔵されており、手荒な扱いを受けたかどうかを検知することができます。
ロボットを操縦するオペレータはコントロールルーム内で主にロボットに搭載されたカメラの映像を頼りにロボットを遠隔操縦します。
競技では、いかに早く救助するかだけでなく、ダミヤンに対する扱いのやさしさも重要な評価基準です。
フィールドやダミヤンの破壊、危険行為などに対しては、審判の判断で反則が採られます。
反則は、「イエローフラグ(警告)」「レッドフラグ(退場)」「ブラックフラグ(失格)」の三つに分類されます。これらに対するペナルティは、競技の一時停止、該当ロボットまたは該当者の退場、競技の没収です。
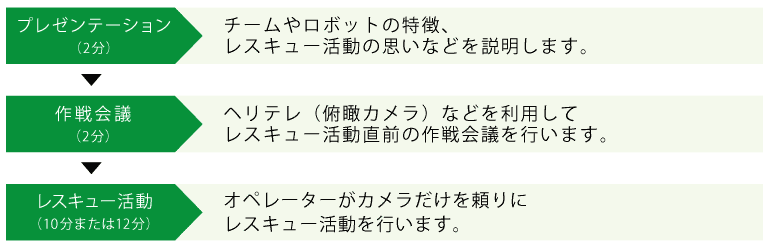
進行
実験フィールドに2チームが両サイド分かれて同時に救助活動(レスキュー活動)を開始します。
フィールドの中には坂道や高台なども設けられており、ロボットだけでダミヤンを時間内に3体救い出し、安全なところまで運ばなければなりません。競技の進行は次のとおりです。
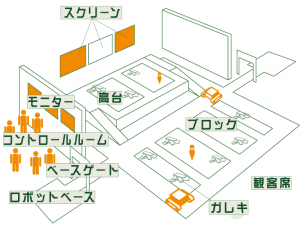
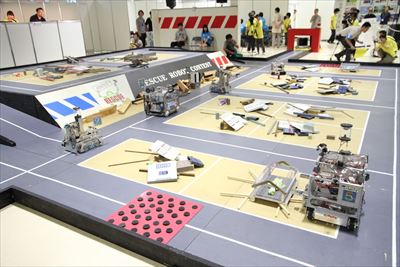
実験フィールド(競技フィールド)
実験フィールドはコントロールルームと壁によって隔てられ、チームメンバーはコントロールルーム内でロボットを遠隔操作します。
競技フィールド内のブロックは複数のエリアで構成され、様々なガレキが配置されています。
ガレキの中には、ダミヤンを覆う倒壊した家屋を模した特殊ガレキもあります。
ダミヤンはいずれかのエリアに配置され、チームは指示されたブロック内からダミヤンを発見し救出を行います。ダミヤンの周囲には複数のエリア内ガレキが配置されていることもあります。
道路上には凹凸のある箇所やロボットがすれ違う場合もあり、ロボットの性能や操縦技能が問われます。
レスキューロボット

ロボットには無線カメラが搭載されており、オペレータ(操縦者)は実験フィールドを直接見ずに、カメラ画像だけを頼りに、無線による遠隔制御を行います。ただし、実験フィールドの全体像を把握するために、高い位置にヘリテレと呼ぶカメラを設置しています。ロボットは競技開始にはロボットベースに待機しており、スタートと同時にそれぞれのルートを通って実験フィールドに向かいます。
レスキューダミー(ダミヤン)

要救助者を模擬した身長20~30cmの人形(ダミー)で、スポンジでできた柔らかい体をしています。
圧力センサや加速度センサを内蔵しており、その信号をフィールド外のコンピュータへ電波で送信します。それに基づいて痛みや不快感を計算してダミヤンインジケーター画面に表示し、フィジカルポイントを評価します。各チームが救出すべきダミヤンの数は1競技3体です。離れた場所から要救助者を診断することを想定して、各ダミヤンには、体重、音、光、胸のマークが個体情報として設定されています。
ミッションメンバー
競技フィールドで競技を行うメンバーが「ミッションメンバー」です。ミッションメンバーの役割は次の通りです。
| キャプテン | チームを統括 |
| スピーカー | チームのアピールを行う |
| オペレーター | ロボットを操縦 |
| ヘルパー | リスタートの際にフィールド上のロボットをロボットベースまで運搬 |
| レスコンボード管理者 | レスコンボードおよびそれに関連する機器の管理を行う |
| コントロールルーム間通信者 | 相手チームと連絡を取り合う |
ダミヤンインジケーター画面
競技中に表示しているインジケーターは、競技中のリアルタイム情報を表示しています。
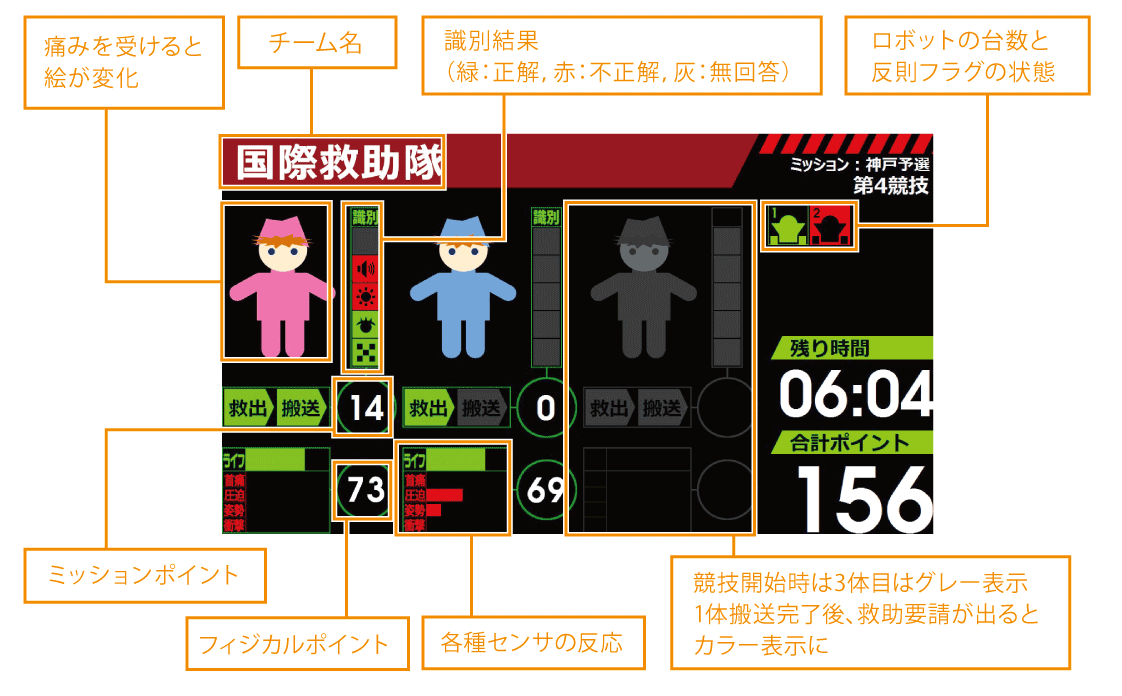
クリックすると大きな画像が表示されます
評価・各賞と表彰
評価
| 競技ポイント(900点満点) | ファーストミッション確定ポイント(450点満点)+ファイナルミッション確定ポイント(450点満点) |
| 総合ポイント(1500点満点) | 競技ポイント(900点満点/上記)+審査員ポイント(600点満点) |
各ミッションの確定ポイントは、以下の二つのポイントを足したものです。
| フィジカルポイント | ダミヤンの体力を表しています。時間の経過と共に値が徐々に減っていき、ダミヤンに内蔵されたセンサが力や衝撃を検出する度に値がさらに減ります。これらは、ダミヤンごとに評価され、最初の値は100点です。 |
| ミッションポイント | 救助作業の達成度を評価します。「救出完了」「搬送完了」および「個体識別」の達成についてそれぞれ所定のポイントが加えられ、満点はダミヤンごとに50点です。「個体識別」は、ダミヤンの個体情報を識別し、救出完了より前に報告する課題です。 3つの要素の配点は、20点、10点、20点と救出完了と個体識別が重視されています。 |
各賞と表彰
優秀な成績を収めたチーム、ロボット、メンバーを様々な賞で表彰します。
- レスキュー工学大賞/inrevium杯/計測自動制御学会特別賞
- 消防庁長官賞
- 日本消防検定協会理事長賞
- べストパフォーマンス賞/日本機械学会ロボティクス・メカトロニクス部門一般表彰
- べストチームワーク賞(消防防災ロボット技術ネットワーク賞)
- べストプレゼンテーション賞
- べストテレオペレーション賞(サンリツオートメイション賞)
- べストロボット賞/日本ロボット学会特別賞

レスキュー工学大賞について
レスキュー工学の観点から、「コンセプト」、「技術力」、「組織力」を総合的に判断して最もすぐれたチームに対して贈られる賞が、レスキュー工学大賞です。
| 「コンセプト」 | レスコンのフィロソフィーに則り、提示されたレスコンのストーリーの中でチームが示すレスキューに対する考え方、およびそれを実現するロボットのアイデアを評価します。また、これらチームのコンセプトやアイデアが提出書類や競技でのプレゼンテーションで分かりやすく表現されているかを評価します。 |
| 「技術力」 | チームコンセプトを実現するロボット製作の技術力、それらのロボットの実際の競技でのパフォーマンスを評価します。 評価には、競技時の「リスタートの回数」、「各種フラグの回数」等を加味します。 |
| 「組織力」 | ロボット製作を組織的・計画的に遂行するためのチームのマネジメント力、競技中のレスキュー活動におけるチームワーク、相手チームとの連携度など、チームとしての組織力を評価します。 |
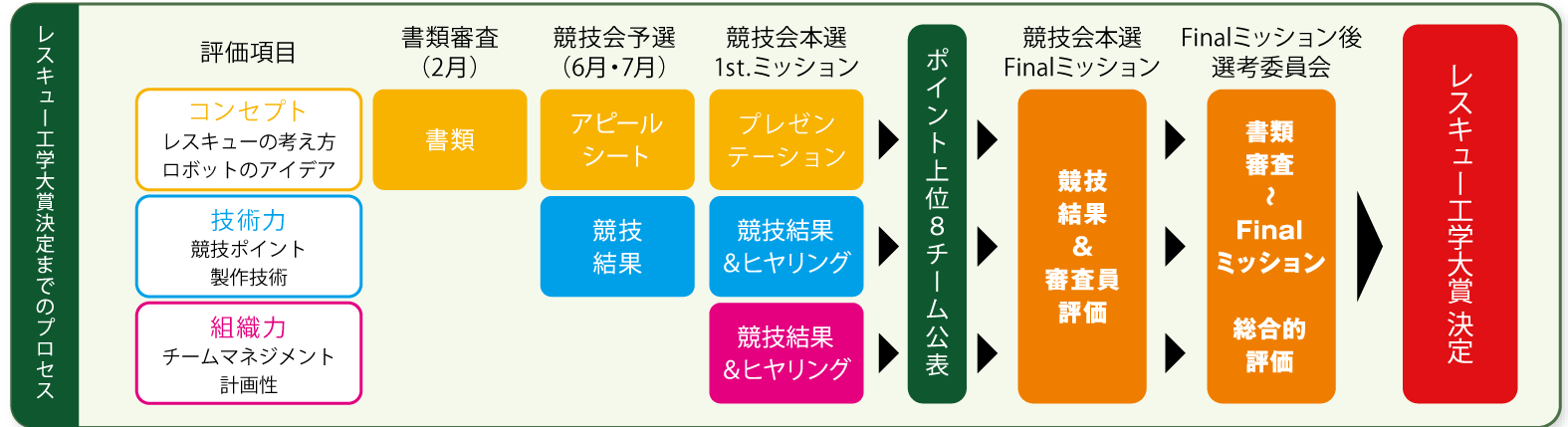
クリックすると大きな画像が表示されます